German Research Center for Artificial Intelligence
1
University of Bremen
2
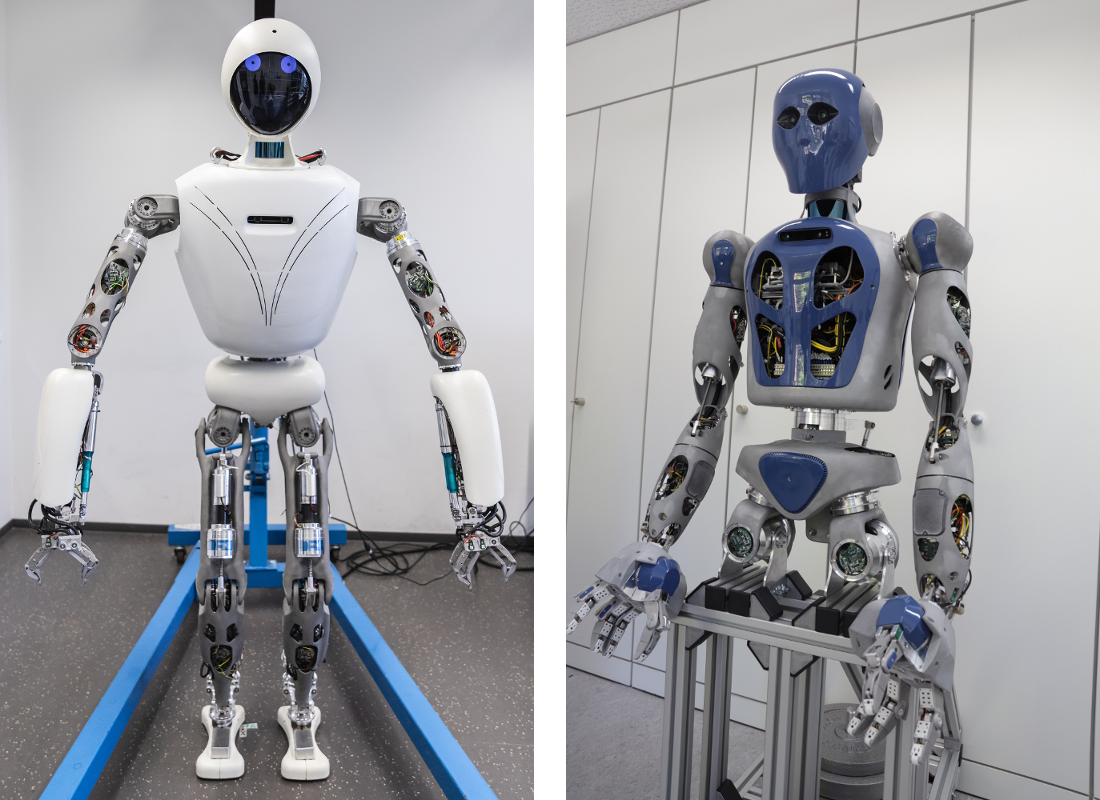
Parallel mechanisms are increasingly used as subsystems in different robots. Compared to serial or tree-type robots, parallel mechanisms can offer higher stiffness, accuracy, and payload capacity at the downside of a reduced workspace and higher complexity in modeling and control. The combination of serial and parallel mechanisms leads to series-parallel hybrid systems, which combine the advantages of both types. Humanoids may benefit from series-parallel designs as they require a stiff structure and optimal distribution of mass-inertia properties. However, robots with series-parallel structure also inherit the complexity of both serial and parallel architectures.
Whole-Body Control (WBC) has emerged as the standard method to control humanoids within the last two decades. Like most other existing software for robot motion planning and control, the existing WBC frameworks can only deal with serial or tree-type robots. In contrast, series-parallel hybrid systems that contain parallel loops in the mechanical structure are usually not supported.
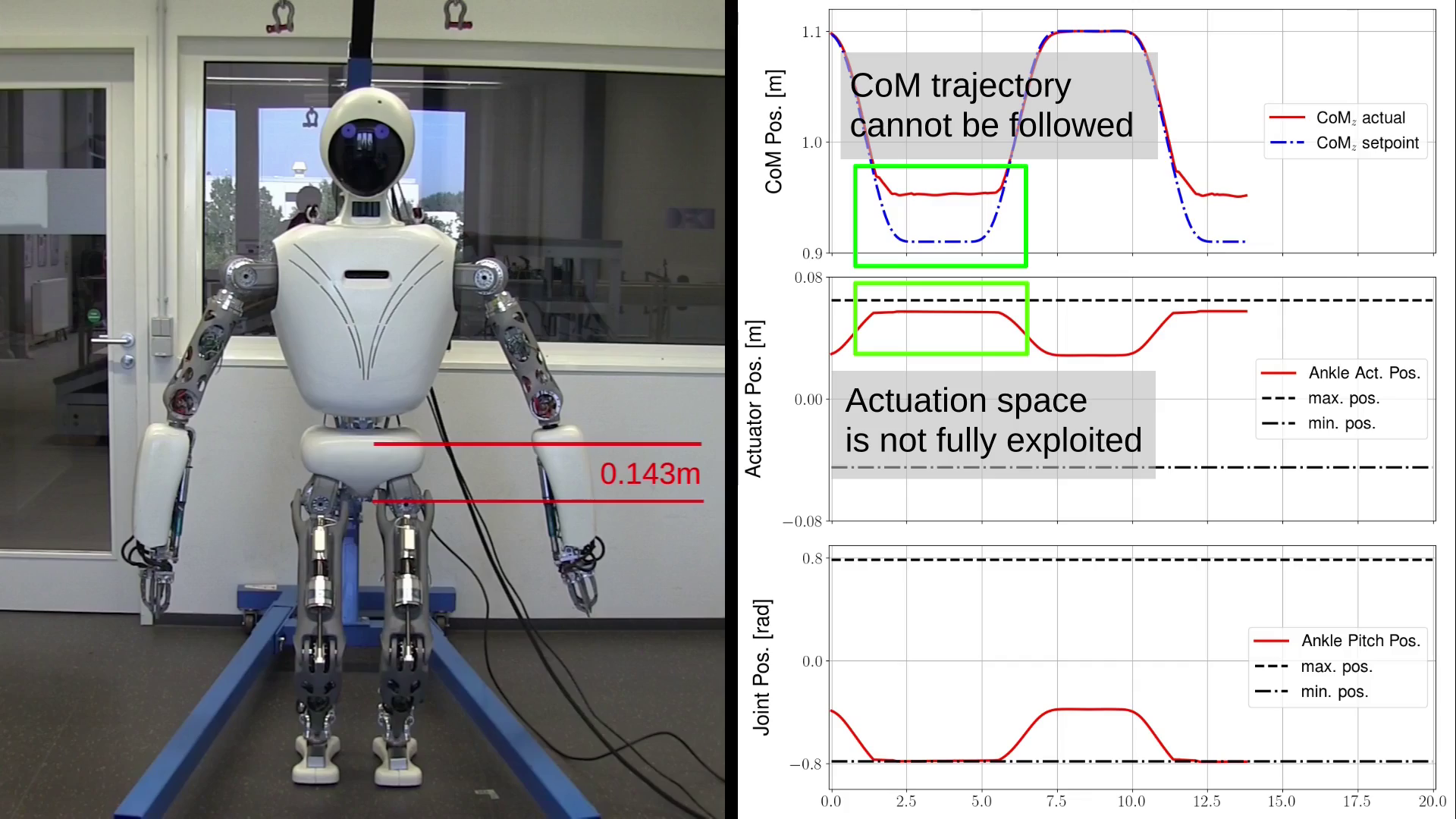
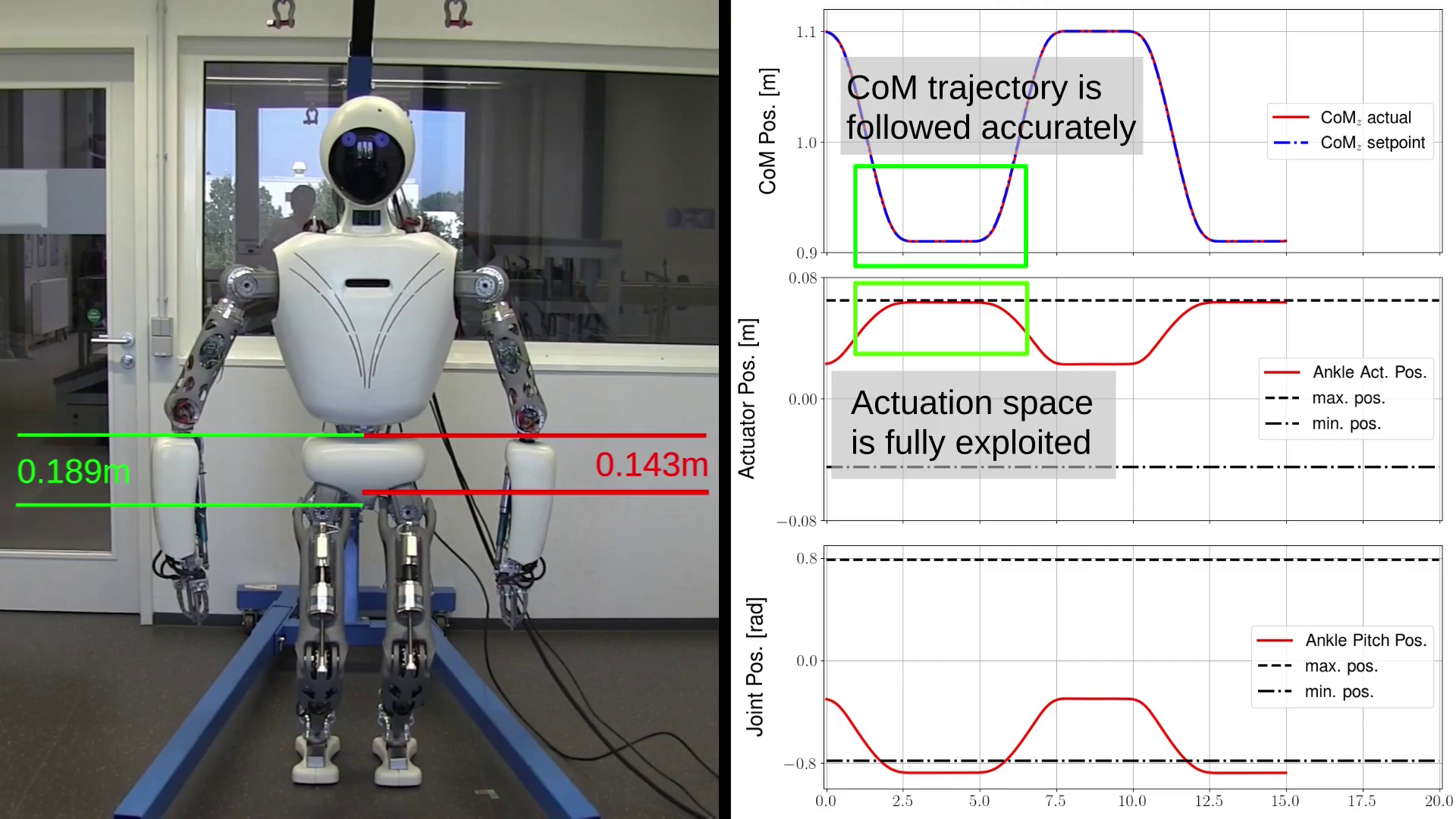
To overcome this limitation, we introduce a computationally efficient WBC framework for series-parallel hybrid robots, which poses the optimization problem in the actuation space of a series-parallel hybrid robot. In doing so, we can fully exploit the workspace of the robot, consider singularities of parallel subsystems and compute more accurate solutions than WBC approaches for tree-type robots.
System with closed loops can be described by three different sets of coordinates:

Loop-closure constraints arising in parallel submechanisms have to considered in the control law in order to achieve a correct solution. By using the HyRoDyn library to compute the kinematic and dynamic quantities, we can setup the WBC problem in the actuation space of a series-parallel hybrid robot. This allows us to e.g., model physical limits of the parallel submechanisms as box constraints in the optimization problem and, thus, exploit the entire workspace of a series-parallel hybrid robot on position, velocity and force/torque level.
We evaluate the integration of actuator position limits as box constraints in our WBC framework and compare the admissible workspace to a WBC approach for tree-type robots, which describes box constraints in independent joint space.
This research was done in the TransFIT (FKZ 50RA1701), M-RoCK (FKZ 01IW21002) and VeryHuman (FKZ 01IW20004) projects funded by the German Aerospace Center (DLR) with federal funds from the Federal Ministry of Economic Affairs and Energy (BMWi) and Federal Ministry of Education and Research (BMBF) respectively.

@INPROCEEDINGS{9811616,
author={Mronga, Dennis and Kumar, Shivesh and Kirchner, Frank},
booktitle={2022 International Conference on Robotics and Automation (ICRA)},
title={Whole-Body Control of Series-Parallel Hybrid Robots},
year={2022},
pages={228-234},
doi={10.1109/ICRA46639.2022.9811616}}